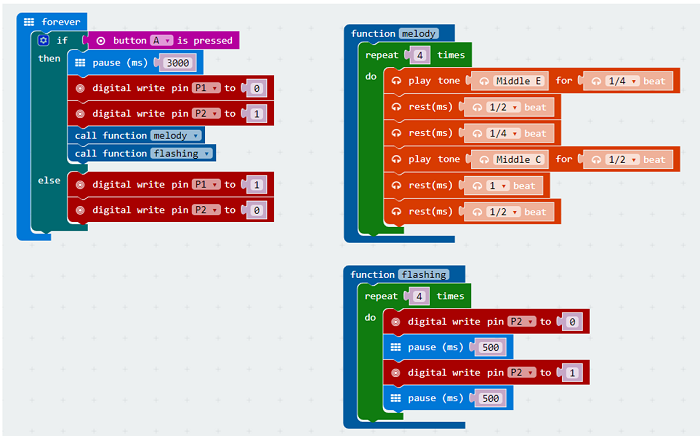
11.1. Un signal piéton à bouton-poussoir
Appuyez sur le bouton-poussoir d’un feu de circulation pour faire changer le feu et faire jouer une mélodie.
| Pièces | |||
| P0 : buzzer | P1 : LED rouge | P2 : LED verte | A : capteur de pression |
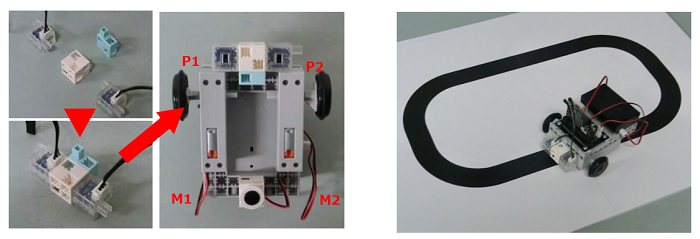
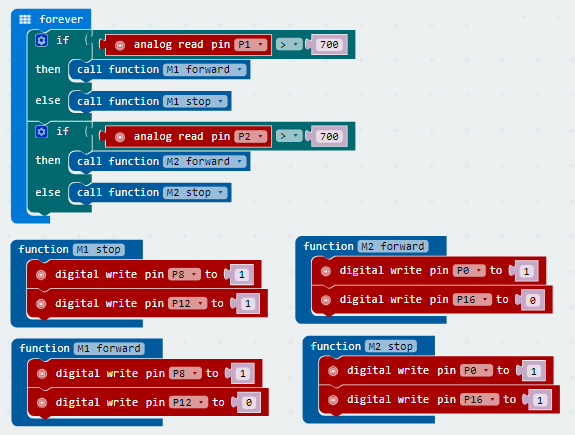
11.2. Traceur de ligne
Cette voiture utilise les différences de valeurs de son photoréflecteur IR sur une surface blanche et noire pour rouler le long d’une piste imprimée à l’encre noire.
| Pièces | |
| P1 : photoréflecteur (droit) | P2 : photoréflecteur (gauche) |
| M1 : moteur (droit) | M2 : moteur (gauche) |
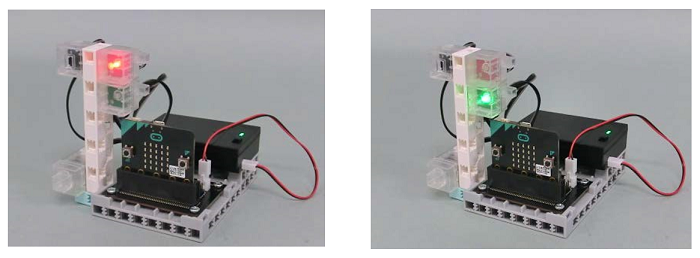
11.3. Système de transport intelligent
![]()
![]() Ce système connecte 2 cartes micro:bit sans fil pour créer un système de conduite automatique.
Ce système connecte 2 cartes micro:bit sans fil pour créer un système de conduite automatique.
Il peut détecter les changements d’un feu de signalisation et les utiliser pour démarrer et arrêter votre robot traceur de ligne.
| Pièces | |||
| Feu de signalisation | P0 : LED verte | P1: LED blanche | P2 : LED rouge |
| Traceur de ligne | → voir 11.2. |
 |
① Feu vert pendant 5 secondes Les données sans fil sont envoyées pendant ce temps. → Le robot traceur de ligne reçoit les données et commence à rouler. |
|
 |
② Feu orange (LED blanche) pendant 1 seconde Les données sans fil sont envoyées pendant ce temps. → Le robot traceur de ligne reçoit les données et s’arrête. | |
 |
③ Feu rouge pendant 5 secondes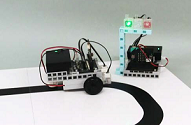 |
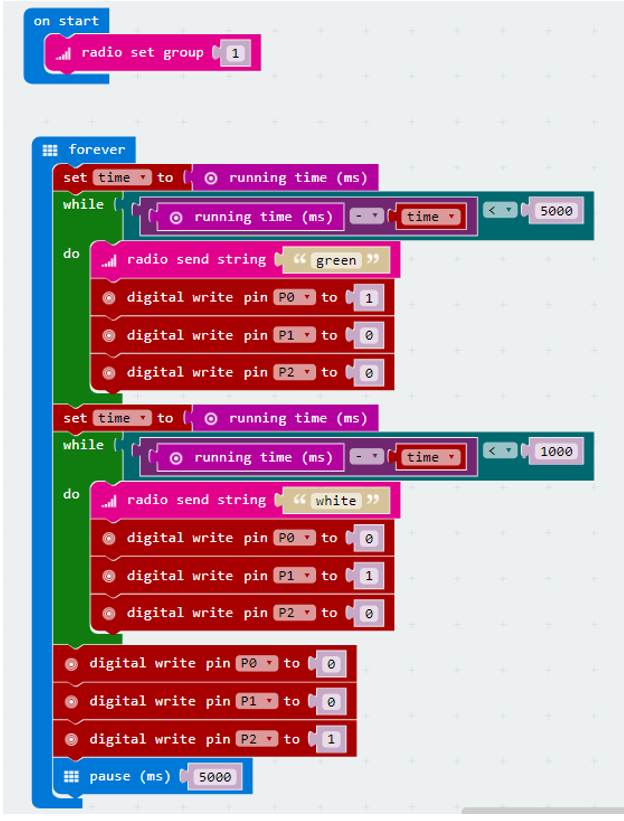
Programme du traceur de ligne
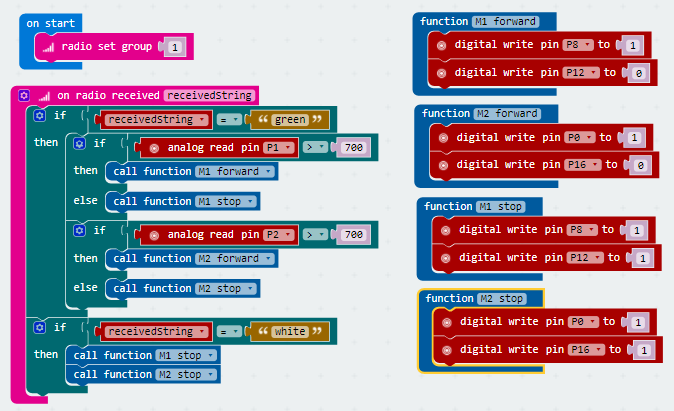
Programme du feu de signalisation
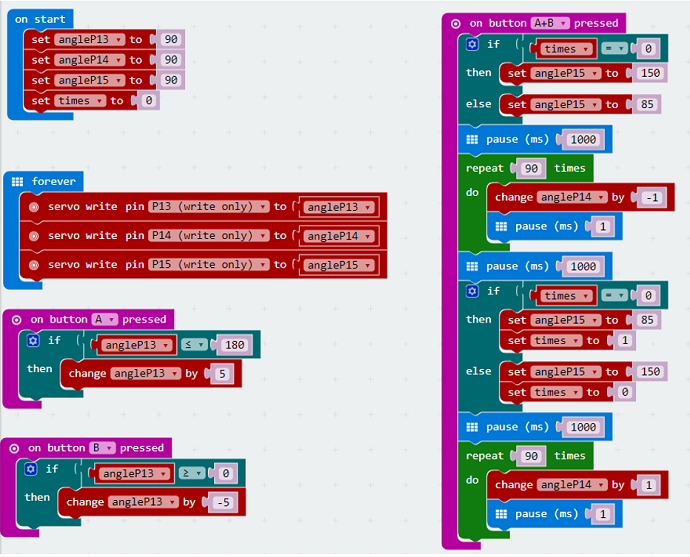
11.4. Bras robotique à 3 axes
Ce bras utilise 3 servomoteurs qui lui permettent de prendre et de déplacer des blocs.
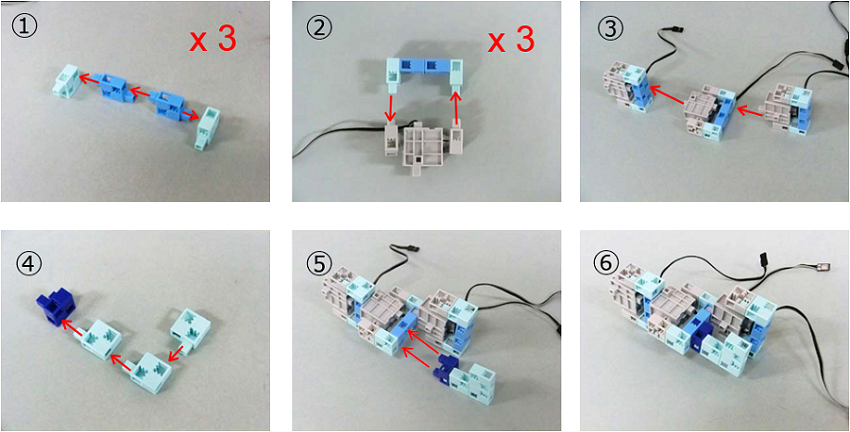
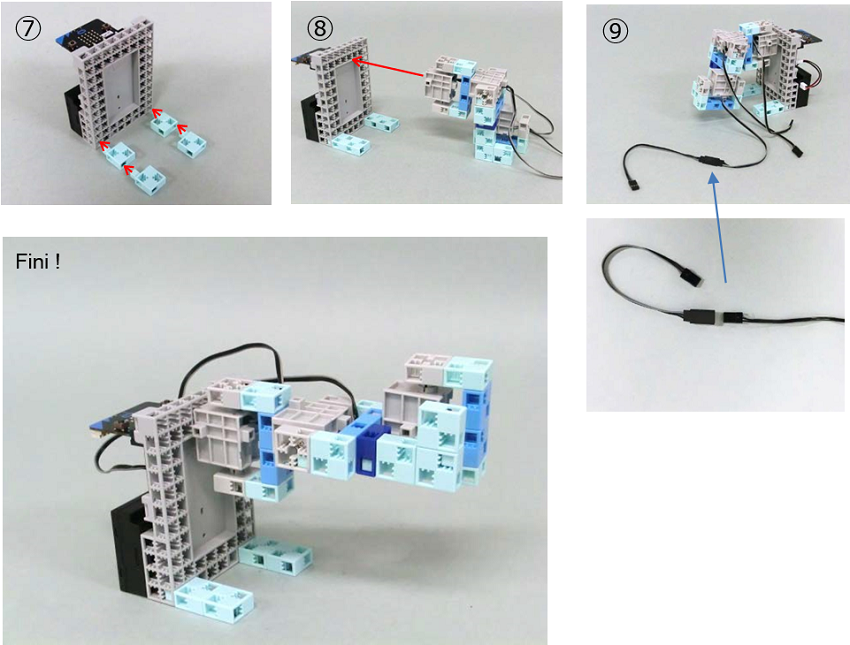
Construction
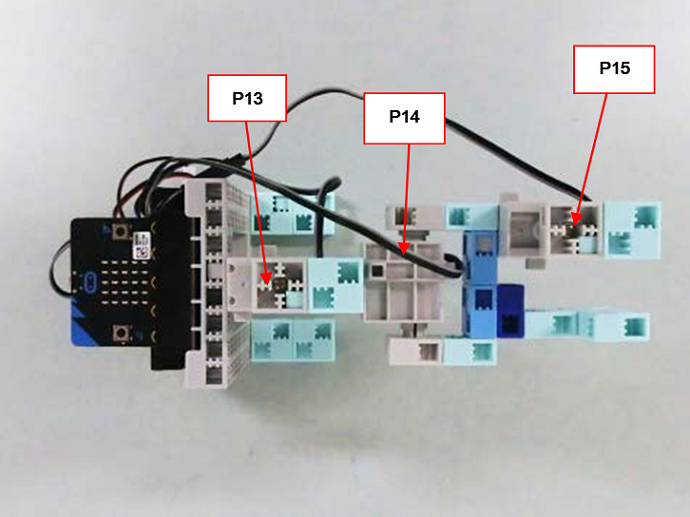
| Pièces | ||
| P13 : servomoteur (arrière) | P14 : servomoteur (centre) | P15 : servomoteur (avant) |
Le bras tournera de 5 degrés à droite à chaque fois qu’on appuie sur A et de 5 degrés à gauche à chaque fois qu’on appuie sur B. Appuyez sur A et B en même temps pour prendre un bloc, puis appuyez à nouveau pour poser le bloc.